
Теперь тараканов-киборгов можно массово производить на роботизированной фабрике. Работы на фабрике могут имплантировать насекомым электронику для создания кибернетически управляемых жуков. Конвейер будет работать со скоростью одно насекомое каждые 68 секунд. Массовое распространение тараканов-киборгов может отрыть новые горизонты в поисково-спасательных операциях или проверках зданий.
Предыдущие эксперименты показали, что можно объединить электронику с живыми насекомыми, чтобы дистанционно контролировать их поведение, не нанося им вреда. Исследования инженеров-механиков из Сингапура помогли упростить процесс имплантации электронных рюкзаков на таких насекомых, как тараканы и жуки, с помощью работа, оснащенного компьютерным зрением.
Профессор Хиротака Сато из Наньянского технологического университета и Линь Цифэн ранее экспериментировали с имплантацией электродов в насекомых, чтобы контролировать их мышцы, нервные системы и органы чувств. Однако ручная имплантация оказалась медленным и сложным процессом из-за щекотливой структуры тела насекомых.
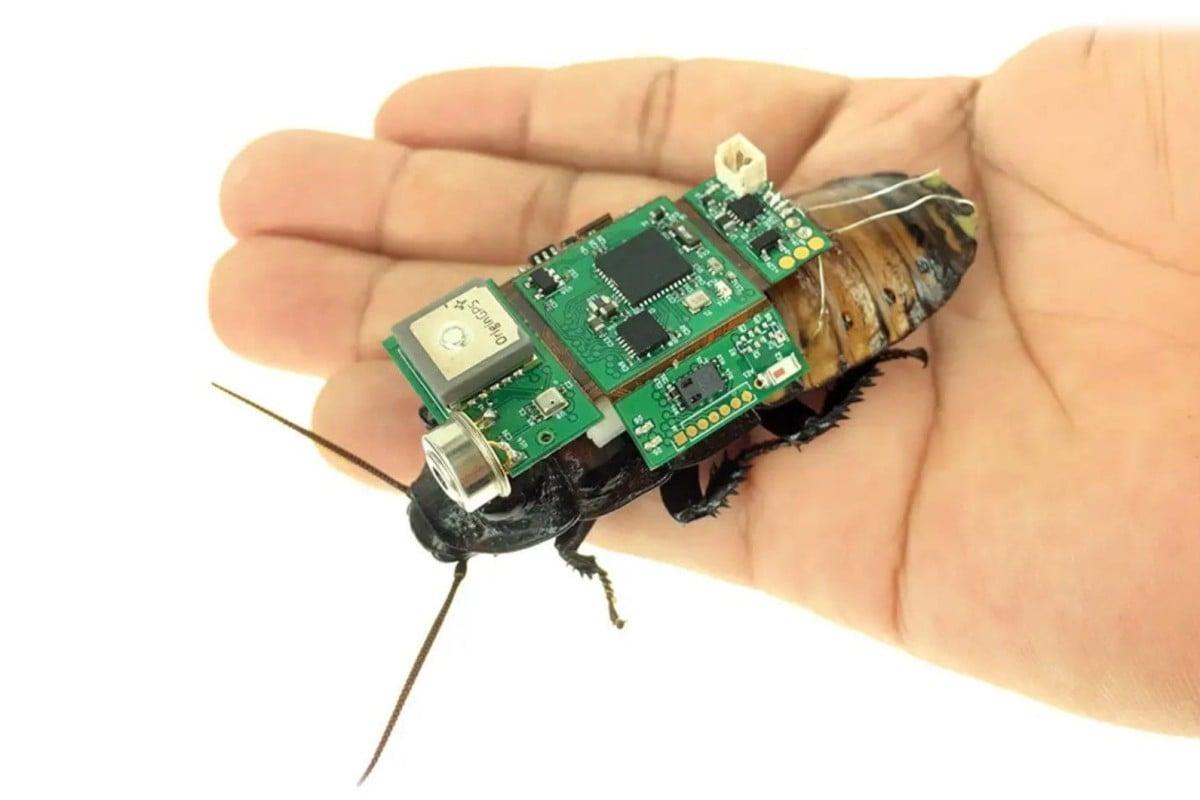
В своих последних экспериментах команда применила работа с визуальными возможностями, чтобы имплантировать электронику в таракана, выбранного за его крепкую переднеспинку, твердую пластину, покрывающую его спину.
Процесс сборки интегрировал систему зрения на основе глубокого обучения для точного определения мест имплантации и включал специальную структуру защиты насекомого.
Система началась с анестезии мадагаскарских шипящих тараканов с помощью углекислого газа. Затем их поместили на платформу, где металлические стержни автоматически фиксировали их положение.
Затем робот, оснащенный компьютерным зрением, идентифицировал структуру тела каждого таракана, учитывая индивидуальные отличия в размере, и определил точное место имплантации. Затем с помощью роботизированной руки насекомое имплантировали электронный рюкзак с монтажными ветвями под рюкзаком для обеспечения стабильности.
Были проведены масштабные опыты, чтоб убедиться в жизнеспособности действий имплантации и стимуляции. Пять киборгов, собранных автоматически, были протестированы на контроль передвижения, включая рулевое управление и замедление, и их производительность сравнивала с системами, собранными вручную.
Команда также опробовала группу из четырех гибридных роботов на открытом воздухе на неровной местности, используя ультраширокополосную систему локализации. В течение 10 минут работы преодолели 80 процентов заполненной препятствиями площади в 4 квадратных метра.
Ученые сказали, что их следующая задача состоит в том, чтобы предоставить насекомым-киборгам возможность работать автономно, что позволит сотням таких роботов работать одновременно.
«В будущем можно будет построить заводы для гибридных роботов-насекомых-компьютеров, чтобы удовлетворить спрос на скорую подготовку и развертывание. Дополнительные датчики могут быть интегрированы в электронные рюкзаки для включения специализированных программ, таких как инспекции и поисковые миссии», — говорится в статье исследователя.
Значительный прогресс в сфере робототехники может также иметь другие потенциальные применения, охватывающие различные отрасли и сценарии реагирования на катастрофы.