
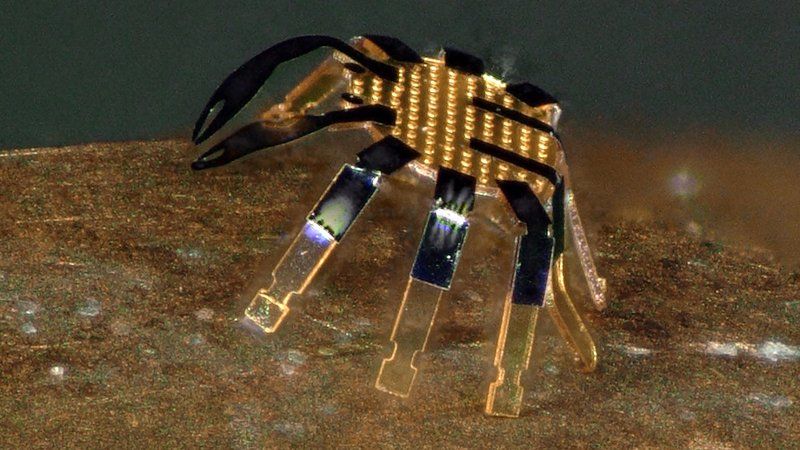
Інженери з Північно-Західного університету в Еванстоні, штат Іллінойс, розробили найменшого ходячого робота у світі, і це краб. Півміліметровий робот змодельований за зразком краба peekytoe crab. Мета створення такого маленького бота — перейти до більш практичного використання технології, наприклад, доступ до важкодоступних, тісно обмежених просторів.
Надзвичайно крихітні роботи мають цілу низку потенційних застосувань, від допомоги з хірургічними процедурами до ремонту техніки в місцях, куди не поміститься гайковий ключ. Чим менше вони стають, тим більше сценаріїв для їхнього використання
За словами дослідників, робот виглядає і рухається, як мініатюрний краб-пиккітой. Цю форму вони обрали за «творчою примхою». Розроблені ними методи можуть бути використані для створення крихітних роботів практично будь-якої необхідної форми.
«Наша технологія дозволяє керувати різними способами руху і він може ходити із середньою швидкістю половини довжини тіла за секунду, — говорить інженер-механік Йонган Хуанг з Північно-Західного університету в Іллінойсі. – Це дуже складно досягти в таких малих масштабах для наземних роботів».

Технологія, на якій базується робот, була спочатку розроблена вісім років тому. Частини робота закріплюються на розтягнутій гумовій підкладці, а коли матеріал розслаблений, пристрій набуває своєї форми. Ретельно калібруючи базові елементи, форму робота можна точно контролювати.
Подібний підхід використовується з рухомими частинами робота, які виготовлені зі сплаву з пам’яттю форми. Ці матеріали перемикаються між двома різними формами залежно від того, нагріваються вони чи ні.
Лазери, які діють як пульт дистанційного керування, використовуються для нагрівання окремих частин робота. Коли ці частини деформуються в іншу форму, вони рухають краба вперед. Немає потреби в джерелі живлення чи двигуні, а тонкий скляний шар гарантує, що компоненти повернуться до початкової форми під час охолодження.
«Оскільки ці структури такі крихітні, швидкість охолодження дуже висока, — каже матеріалознавець Джон Роджерс з Північно-Західного університету. – Насправді, зменшення розмірів цих роботів дозволяє їм бігати швидше».
Направляючи лазери на різні ділянки робо-краба, дослідники можуть задавати напрямок пересування. Регулюючи частоту лазерного сканування, можна також змінювати швидкість руху робота.
Дослідники кажуть, що в їхньому новому процесі є великий потенціал: наприклад, вони можуть змусити роботів повертатися і стрибати, використовуючи ті ж методи. Поки робот знаходиться в межах прямої видимості лазера, ним можна керувати дистанційно.