
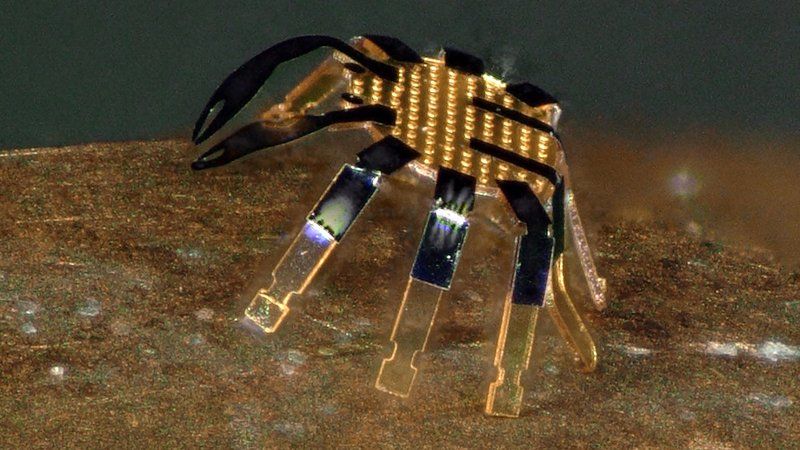
Инженеры из Северо-Западного университета в Эванстоне, штат Иллинойс, разработали малейшего ходячего робота в мире, и это краб. Полмиллиметровый робот смоделирован по образцу краба peekytoe краб. Цель создания такого маленького бота – перейти к более практичному использованию технологии, например, доступ к труднодоступным, тесно ограниченным пространствам.
Очень крохотные работы имеют целый ряд потенциальных применений, от помощи с хирургическими процедурами до ремонта техники в местах, куда не поместится гаечный ключ. Чем меньше они становятся, тем больше сценариев для их использования
По словам исследователей, робот выглядит и двигается, как миниатюрный краб-пикитой. Эту форму они избрали по «творческой прихоти». Разработанные ими способы могут быть использованы для сотворения крохотных роботов фактически хоть какой нужной формы.
«Наша технология позволяет управлять разными способами движения и он может ходить со средней скоростью половины длины тела в секунду, – говорит инженер-механик Йонган Хуанг из Северо-Западного университета в Иллинойсе. – Это очень сложно достичь в столь малых масштабах для наземных роботов».

Технология, на которой базируется робот, была первоначально разработана восемь лет назад. Части работа закрепляются на растянутой резиновой подложке, а когда материал расслаблен, устройство принимает свою форму. Тщательно калибруя базовые элементы, форму работы можно точно контролировать.
Подобный подход используется с движущимися частями робота, изготовленными из сплава с памятью формы.Эти материалы переключаются между двумя разными формами в зависимости от того, нагреваются они или нет.
Лазеры, действующие в качестве пульта дистанционного управления, используются для нагрева отдельных частей робота. Когда эти части деформируются в другую форму, они двигают краб вперед. Нет потребности в источнике питания или двигателе, а тонкий стеклянный слой гарантирует, что компоненты вернутся в исходную форму во время охлаждения.
«Поскольку эти структуры так крошечны, скорость охлаждения очень высока, — говорит материаловед Джон Роджерс из Северо-Западного университета. – На самом деле, уменьшение размеров этих роботов позволяет им бегать быстрее».
Направляя лазеры на разные участки робо-краба, исследователи могут задавать направление передвижения. Регулируя частоту лазерного сканирования, можно изменять скорость движения робота.
Исследователи говорят, что в их новом процессе есть большой потенциал: например, они могут заставить роботов возвращаться и прыгать, используя те же методы. Пока робот находится в пределах прямой видимости лазера, им можно управлять дистанционно.