
Тепер тарганів-кіборгів можна масово виробляти на роботизованій фабриці. Роботи на фабриці можуть імплантувати комахам електроніку для створення кібернетично керованих жуків. Конвеєр працюватиме зі швидкістю одна комаха кожні 68 секунд. Масове поширення тарганів-кіборгів може відрити нові горизонти в пошуково-рятувальних операціях або перевірках будівель.
Попередні експерименти показали, що можна об’єднати електроніку з живими комахами, щоб дистанційно контролювати їх поведінку, не завдаючи їм шкоди. Дослідження інженерів-механіків із Сінгапуру допомогли спростити процес імплантації електронних рюкзаків на таких комах, як таргани та жуки, за допомогою робота, оснащеного комп’ютерним зором.
Професор Хіротака Сато з Наньянського технологічного університету та Лінь Цифен раніше експериментували з імплантацією електродів у комах, щоб контролювати їхні м’язи, нервові системи та органи чуття. Однак ручна імплантація виявилася повільним і складним процесом через делікатну структуру тіла комах.
У своїх останніх експериментах команда застосувала робота з візуальними можливостями, щоб імплантувати електроніку в таргана, вибраного за його міцну переднеспинку, тверду пластину, що покриває його спину.
Процес складання інтегрував систему зору на основі глибокого навчання для точного визначення місць імплантації та включав спеціальну структуру для захисту комахи.
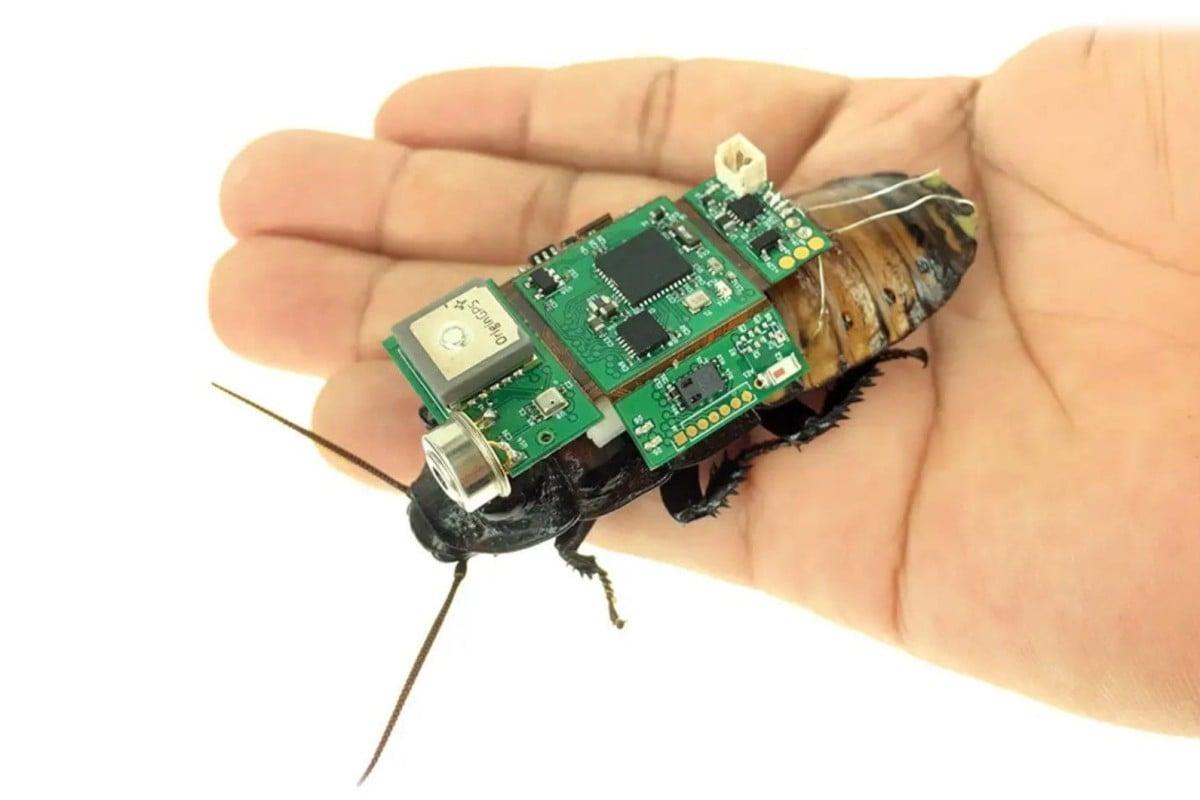
Система почалася з анестезії мадагаскарських шиплячих тарганів за допомогою вуглекислого газу. Потім їх помістили на платформу, де металеві стрижні автоматично фіксували їх положення.
Потім робот, оснащений комп’ютерним зором, ідентифікував структуру тіла кожного таргана, враховуючи індивідуальні відмінності в розмірі, і визначив точне місце імплантації. Потім за допомогою роботизованої руки на комаху імплантували електронний рюкзак із монтажними гілками під рюкзаком для забезпечення стабільності.
Були проведені масштабні експерименти, щоб переконатися в життєздатності процесів імплантації та стимуляції. П’ять кіборгів, які були зібрані автоматично, були протестовані на контроль пересування, включаючи рульове керування та уповільнення, і їхню продуктивність порівнювали з системами, зібраними вручну.
Команда також випробувала групу з чотирьох гібридних роботів на відкритому повітрі на нерівній місцевості, використовуючи ультраширокосмугову систему локалізації. Протягом 10 хвилин роботи подолали 80 відсотків заповненої перешкодами площі у 4 квадратних метри.
Вчені сказали, що їхня наступна задача полягає в тому, щоб надати комахам-кіборгам можливість працювати автономно, що дозволить сотням таких роботів працювати одночасно.
«У майбутньому можна буде побудувати заводи для гібридних роботів-комах-комп’ютерів, щоб задовольнити попит на швидку підготовку та розгортання. Додаткові датчики можуть бути інтегровані в електронні рюкзаки, щоб увімкнути спеціалізовані програми, такі як інспекції та пошукові місії», — йдеться в статті дослідника.
Значний прогрес у сфері робототехніки також може мати інші потенційні застосування, що охоплюють різні галузі та сценарії реагування на катастрофи.