
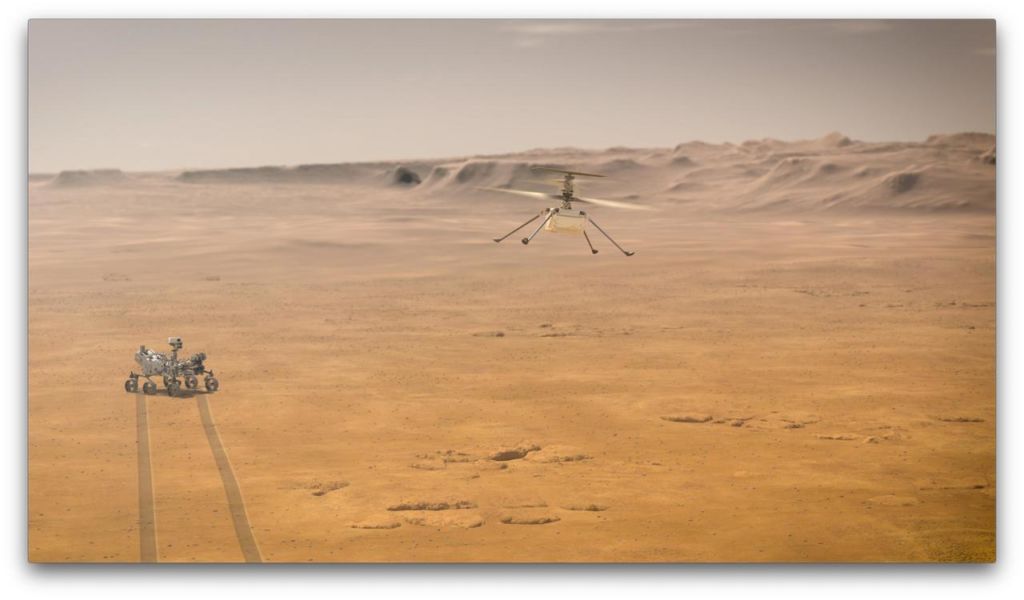
Марсоход Perseverance на днях приземлился на Красной планете, и это стало историческим событием для фанатов операционной системы Linux. Ведь на борту этого ровера есть первый в истории марсианский вертолет, и он работает на базе ОС с логотипом пингвина.
Предыдущие марсианские роверы NASA использовали операционную систему от компании Wind River Systems. Однако для марсианского вертолета выбрали Linux. Фреймворк на базе открытого программного обеспечения создали несколько лет назад для крошечных спутников типа cubesat и других инструментов.
«Вы можете получить программное обеспечение, которое использует марсианский вертолет, и привлечь его в своем проекте. Это, так сказать, победа для открытого исходного кода, потому что мы запустили в полет операционную систему с открытым исходным кодом, и фреймворк с открытым исходным кодом, и коммерческие части, которые можно купить в магазине, если хочется сделать это самостоятельно, – комментирует инженер NASA Тим Кэнхем. – Это новая вещь для NASA потому, что они склоняются к тому, что надежное и проверенное, но очень многие люди увлечены новостью и мы ожидаем это сделать».
Сам ровер Perseverance продолжает использовать проприетарную операционную систему VxWorks от компании Wind River Systems. Именно ее привлекали в предыдущих марсианских миссиях.
Linux для вертолета выбрали потому, что дрон Ingenuity использует коммерчески доступные компоненты. Например, его процессором служит чип Qualcomm Snapdragon 801 – флагман смартфонов 2014 года. Операционная система VxWorks не поддерживала этот процессор.
Смартфонный процессор выбрали потому, что работоспособная плата с ним компактна, а сам он очень производителен, по сравнению с существующим навигационным оборудованием NASA. Циклы стабилизации вертолета в атмосфере работают с частотой 500 Гц, дрон записывает видео 30 fps и анализирует данные от своих датчиков.
Возможность работы вертолета на Марсе станет историческим достижением и откроет путь к новым типам дронов для изучения этой планеты. Ведь ее атмосфера в разы более разрежена, чем земная, что создает сложности для использования аэродинамических поверхностей типа крыльев и винтов. За это, например, сам Perseverance не мог спуститься на парашютах с орбиты, и инженерам пришлось использовать «небесный кран» – площадку с реактивными двигателями, которая спустил ровера на поверхность планеты на тросах.